Other projects
I love building and tinkering with mini projects, and they have given me a great hobby and the STEM experience needed to pursue my larger projects.
Background
Building projects is one of my favorite pastimes, and sometimes it’s worthwhile to follow through with an idea even if it isn’t a long-term project. Below is a compilation of some of my favorite smaller projects that I’ve dove into in the past.
Robotic arm (2022-2023)
First started in grade 9, I aimed to create a fully self-designed robot arm from scratch. This included creating the frame, belt systems, custom 3D-printed cycloidal gearboxes, and programming the controls.
The arm used a belt-drive with 4 Nema 23 stepper motors for actuation. A Raspberry Pi handled the controls and object detection using OpenCV.
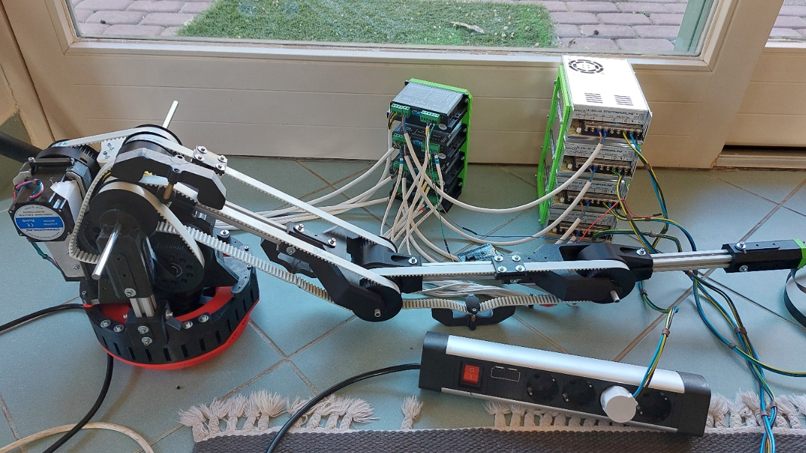
This is the completed robot arm. The Nema 23 motors are housed in the base of the arm, which aims to increase its maximum payload. This choice resulted in challenges with belt routing and vibrations due to belt elasticity but altogether it led to a net benefit. The electronics used were DM556T drivers, 48V power supplies, and a Raspberry Pi.
A video of a disassembled 3D-printed cycloidal drive used in the robot.

This photo shows the robot arm when it temporarily did not have timing belts because of challenges with belt choice. 7 meters of timing belts were needed, and to minimize costs I experimented with stainless steel wires, wires with clamped M3 nuts, and old bike chains, but slipping appeared inevitable. Eventually I used a significantly less expensive metal-cord timing belt, which worked well but made hand stitching the belts more time consuming.
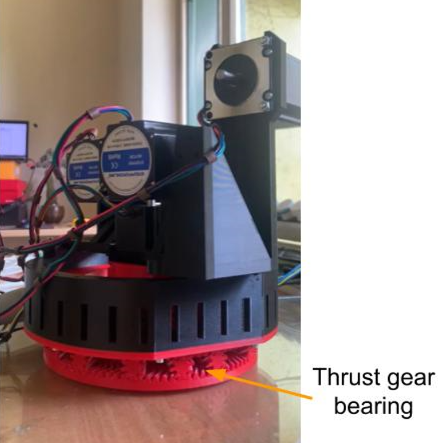
This photo shows the first test of the 3D-printed thrust herringbone gear bearings. I designed the gears to avoid the slipping potentially encountered in bearings using cylinders or spheres. 2 gear bearings are stacked on top of each other to prevent them from opening up. The bearings still run smoothly.
RC Airplanes (2021-2025)

This was the first version of the RC airplane. It used the RC Spitfire design from 3DLabPrint.com. The plane ended up being underpowered.

This is the 3rd version of the RC plane, again using the 3DLabPrint spitfire.
V4 of the RC airplane, this time using another 3DLabPrint model.

V6 was my 2nd fully self-designed RC plane. Instead of Monokote, tarps remaining from the 2024 Danube floods were used for covering. It successfully flew several times.

Airplane V6 assembled without electronics.
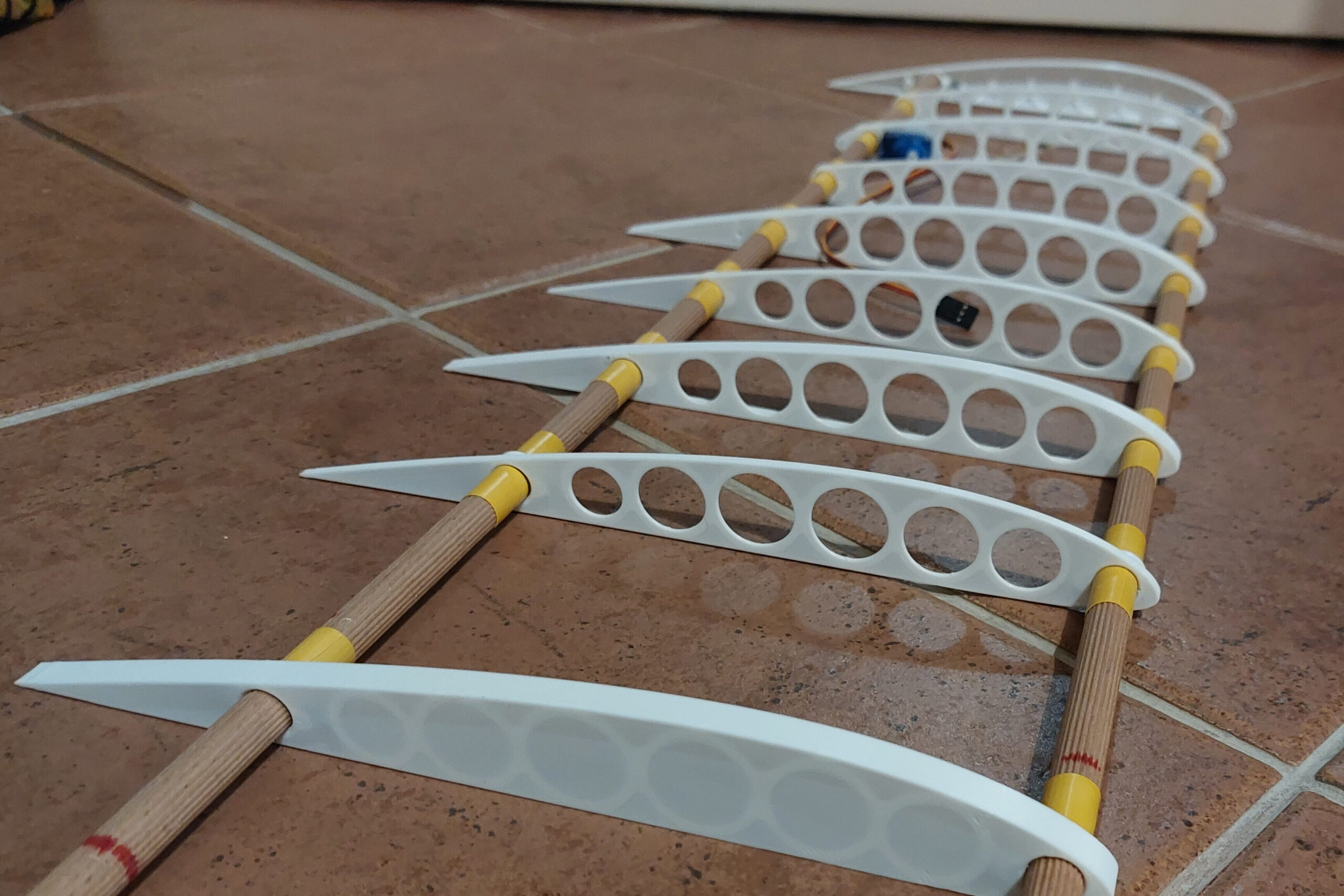
Airplane V6’s rib structure.

Airplane V6.2’s rib structure once coated in shrink wrap.

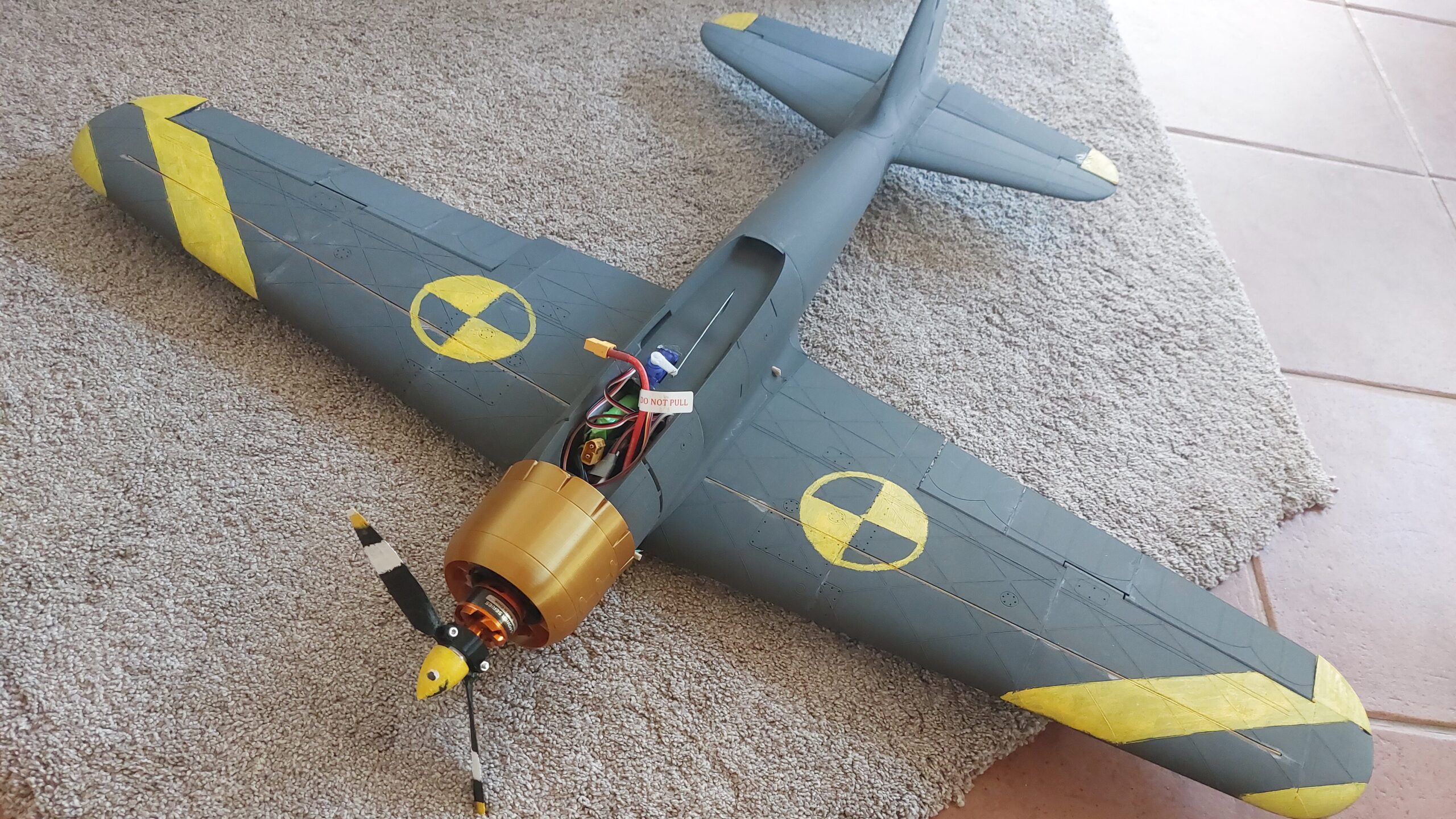
Airplane V7 was virtually fully made out of foamboard, with the exception of the 3D-printed ribs. As can be seen on the image, after a rough landing (CG was to far forwards) it was repaired using masking tape. The plane flew for a total of 8.5 minutes in one flight, which is my current record.
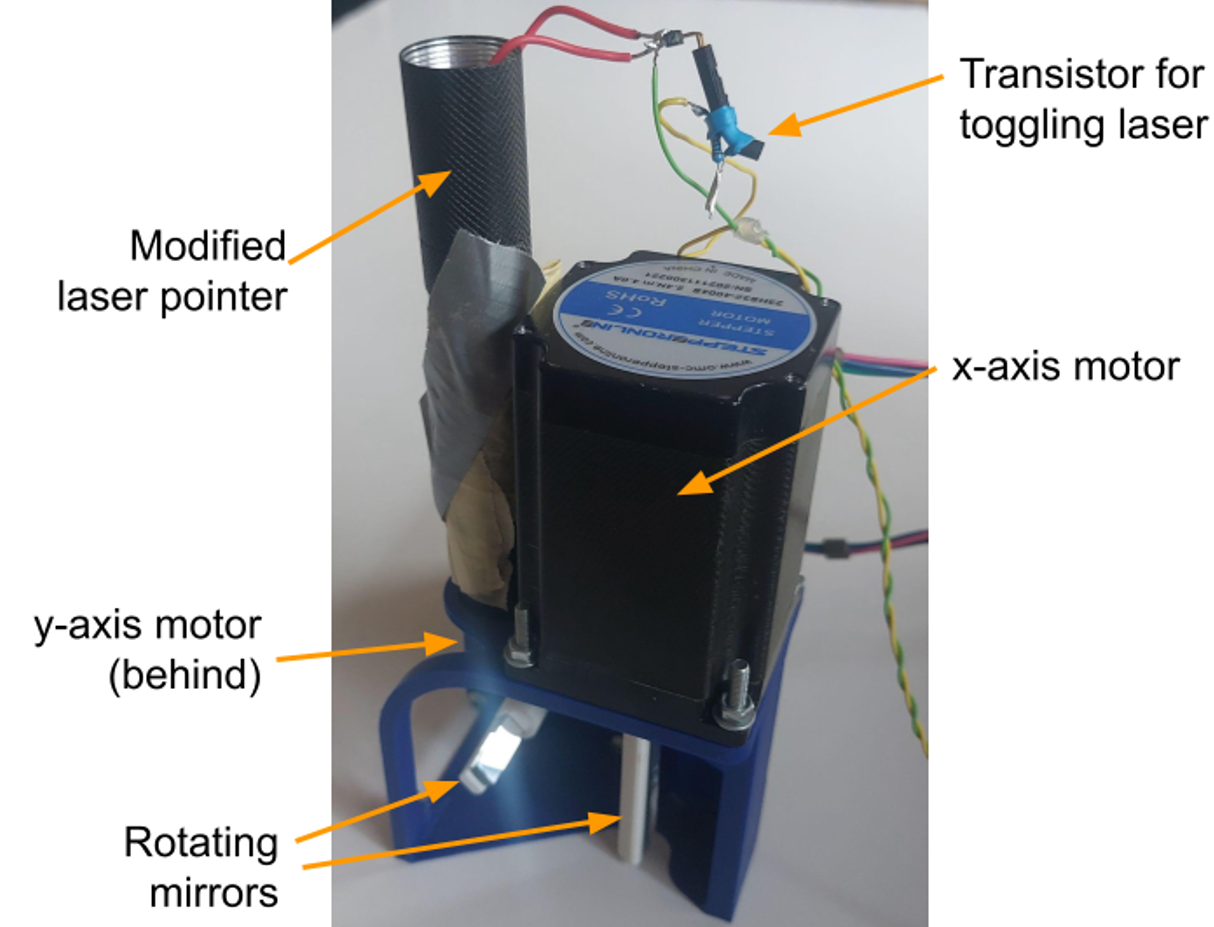
Laser-pointer robot (2023-2025)
Made to mimic the output of a galvanometer with Nema 23 stepper motors. Uses a small laser pointer that is repurposed to be toggled with a transistor via a Raspberry Pi.
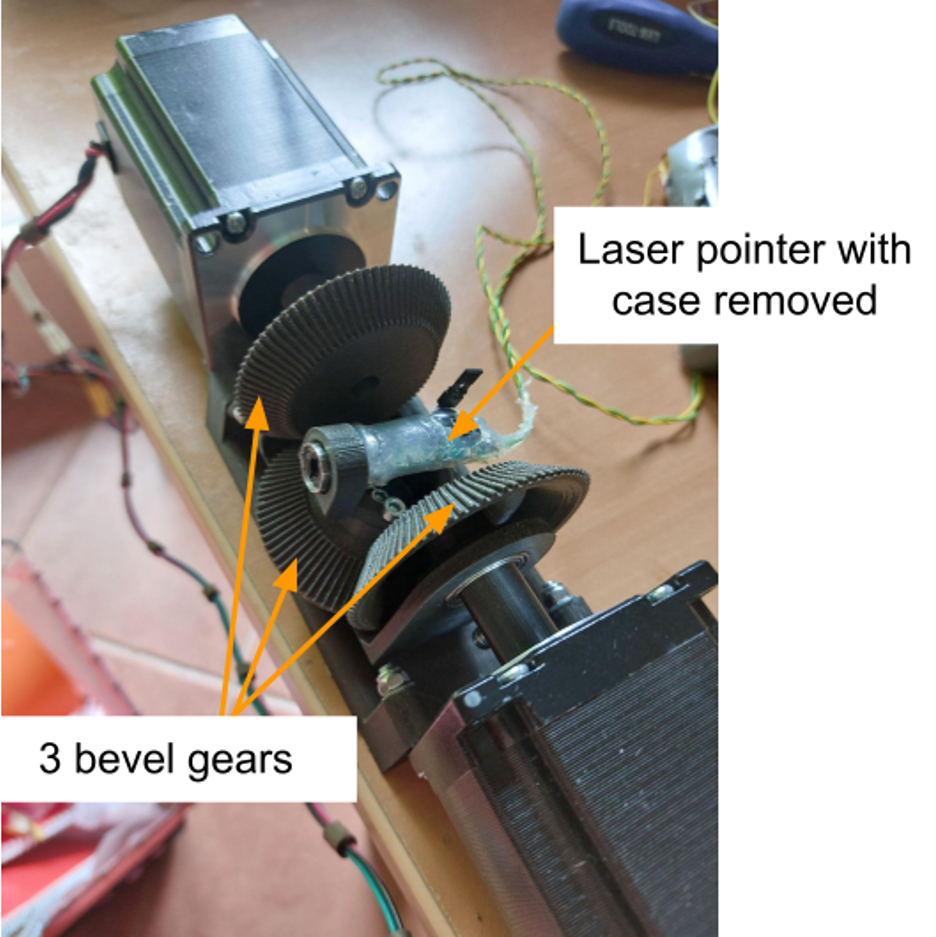
Many early versions of the laser pointer robot used two stepper motors and bevel gears to direct the laser’s beam. I was inspired by the mechanism for differential steering, which was an upgrade compared to the first version that had a 28BYJ-48 motor continuously being rotated and shaken. Despite the lower moment of inertia, the mechanism could still make even the Nema 23-s skip steps, and the path of the laser also had sinusoidal fluctuations stemming from the gearing. Regardless, this version could create images comparable in quality to the newest version of the robot.
This newest version uses two mirrors connected to stepper motors to redirect the beam of a laser. This has shown to be very effective, because it opens the door to faster movements with fewer vibrations. Additionally, the mirrors eliminated backlash and allowed a larger and slightly more powerful laser pointer to be used.
A Python program I wrote converts any image into an array of black and white pixels, after which another Python program parses through that array and synchronizes toggling the laser with motor movements. Currently, the main factor limiting the speed is the rate at which the laser saturates the glow in the dark paint. Because I took the mirrors from a scrapped printer, the mirrors have minor scratches and defects that occasionally translate onto the output of the robot.
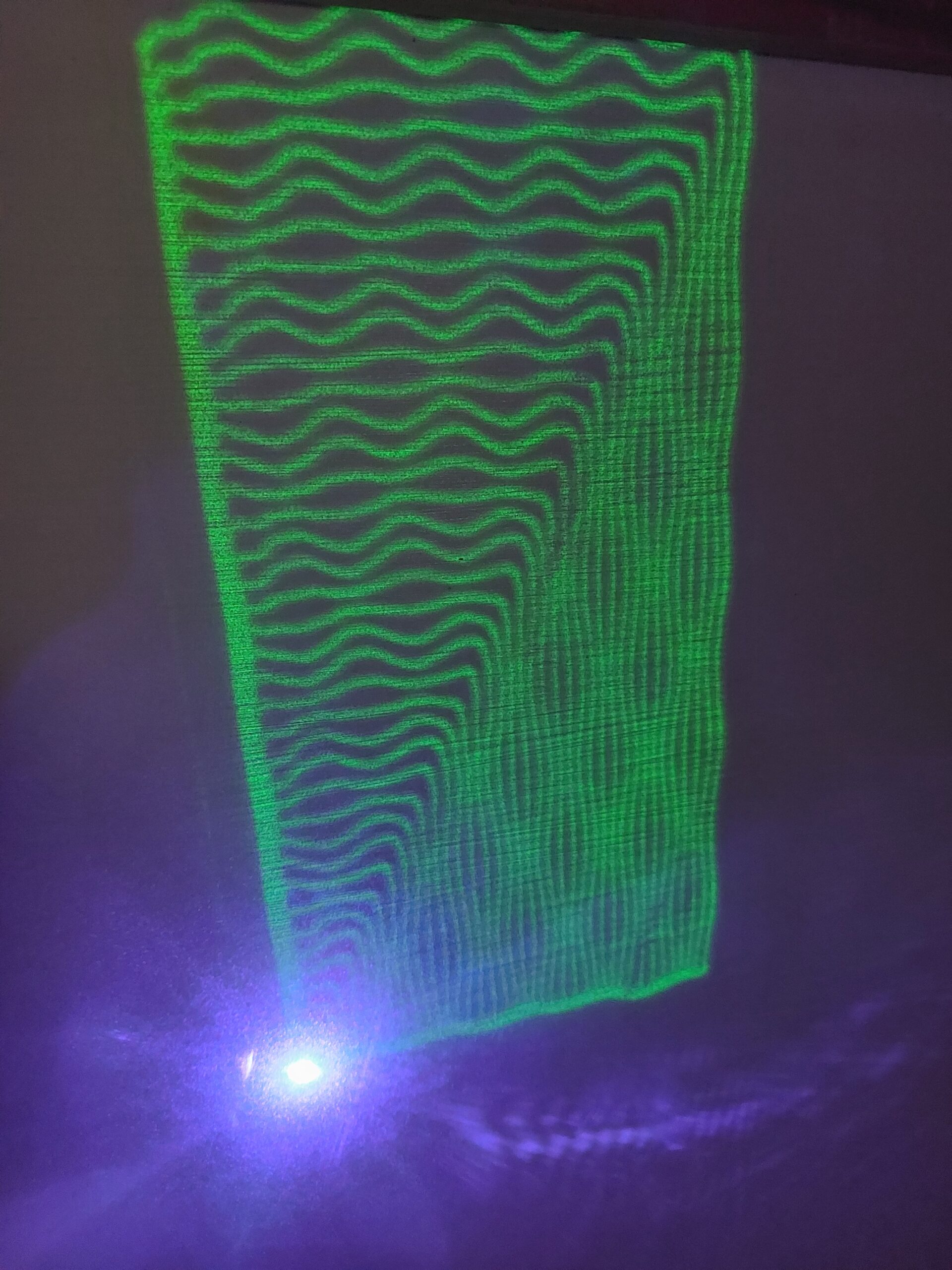
Another example of a drawing, made by the versions with the differential-style control.
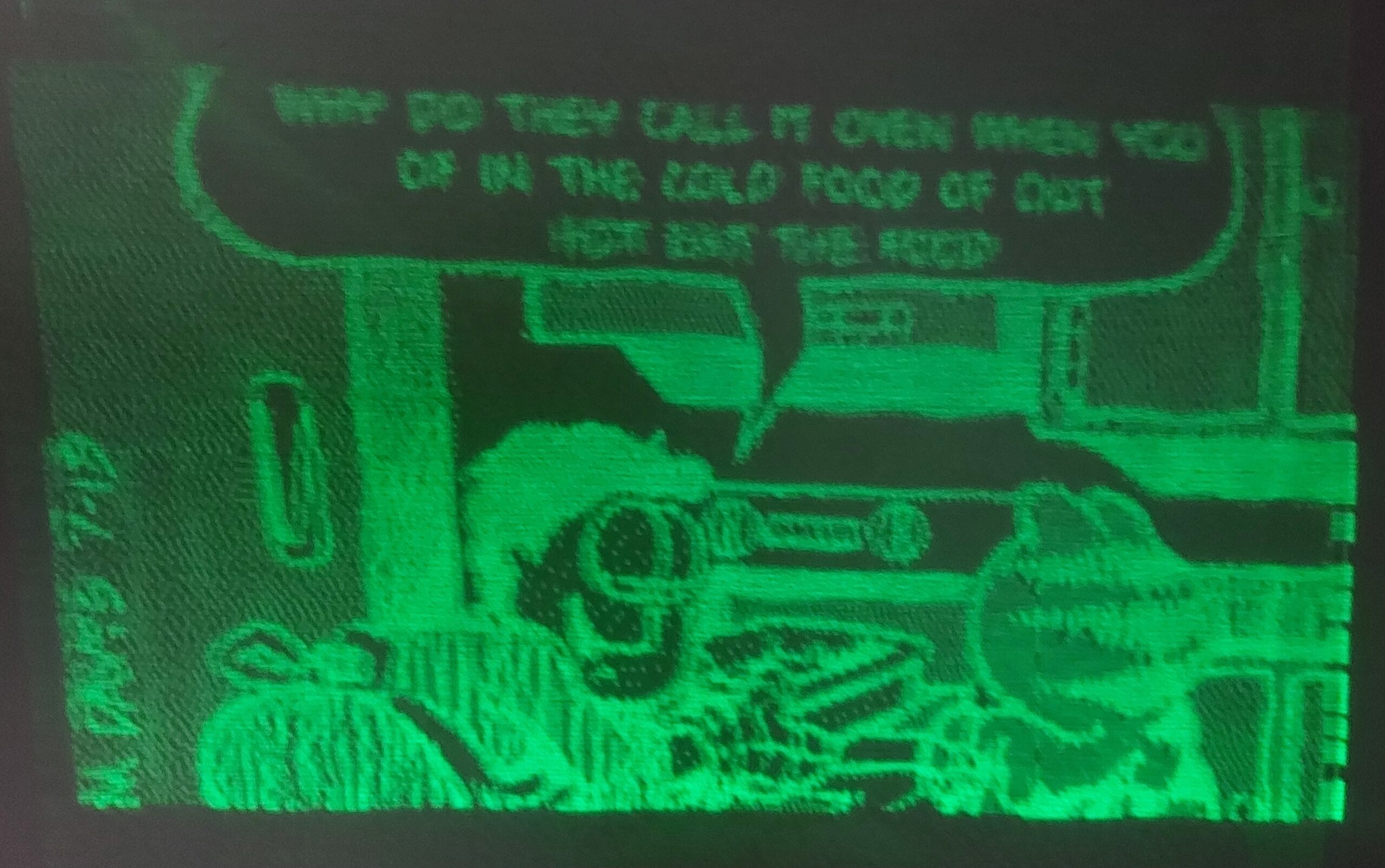
An example of a drawing made with the laser pointer robot onto a glow in the dark wall. Made by the newest version.
Truly miscellaneous projects (2021-2025)
These are some of many projects that I worked as a hobby, without a particular long term goal for them. They are some of my favorite ways to experiment and learn engineering.
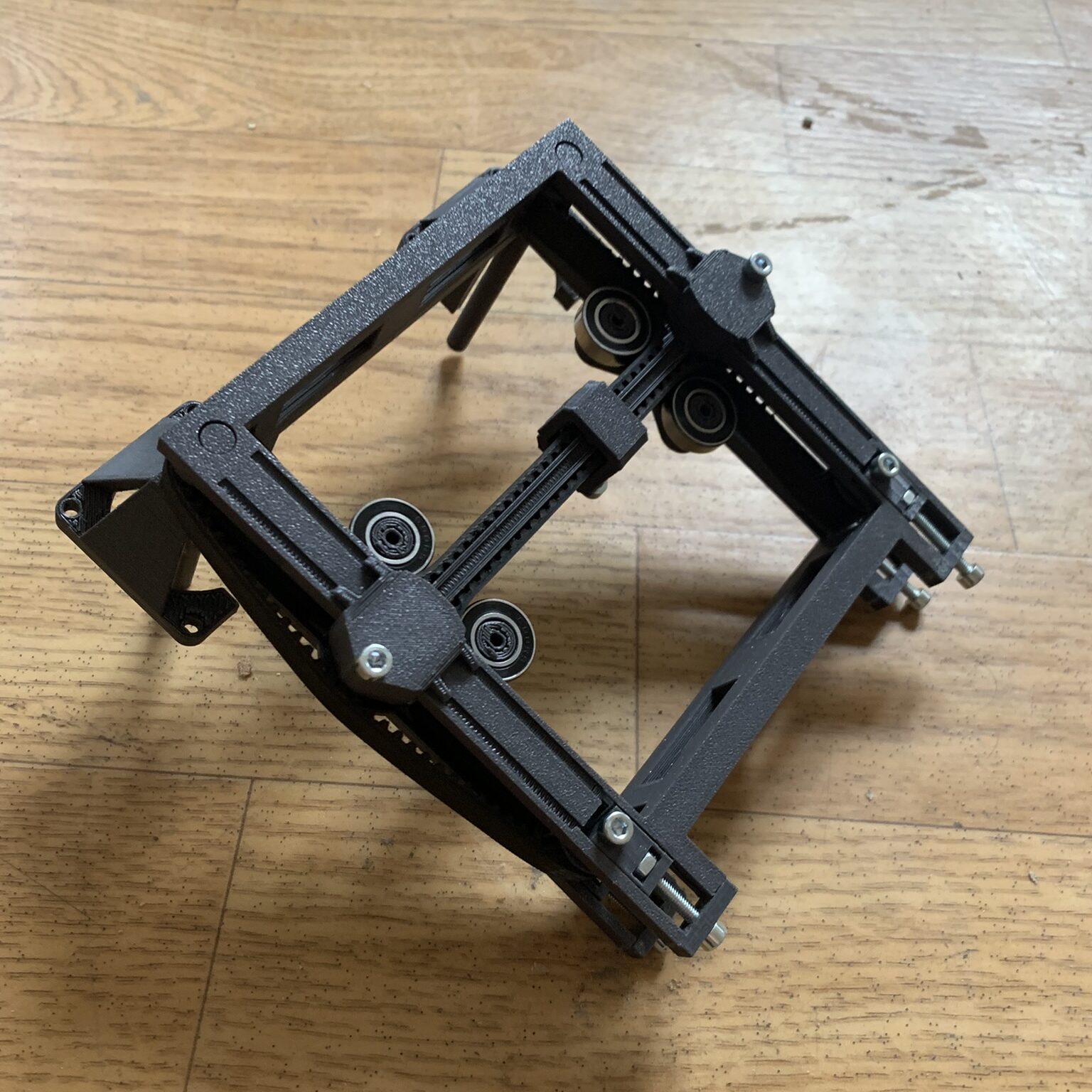
Building a gantry was a long running dream of mine, and after researching pick and place machines I wanted to mimic their speed and precision. The gantry used an H-Bot belt configuration, braided fishing line as a low-cost belt, and motors from my robot arm. The gantry could run fast enough to need slow motion to see all of its movements.
I used carbon fiber rods for the x-axis rail to minimize weight, but to preserve the rods they were clamped between 3D printed parts instead of being drilled into. This solution was not perfect, as over time the x-axis repeatedly expanded slightly, which required regular retightening. The gantry used a Raspberry Pi camera-based homing sequence to minimize the resultant positional drift.

This was a farewell gift for my 8th grade homeroom teacher. It was her last year teaching our class, and the majority of my classmates had her since first grade. Because she and her husband loved chess, and there were exactly 32 of us in the class, I 3D scanned all of us and made a chess set where each student is a piece.
Everyone could choose a signature pose (e.g. Gergő had a ball because he played Korfball, Panni had a kayak paddle, etc.). I used an iPad with LIDAR to create the scans; processing the scans in Meshmixer and Blender took weeks of work.

In 2022 I started growing Carolina Reapers, and I wanted to check on them when I was away from home. I programmed a Raspberry Pi with a camera module v2 to take photos whenever an email address receives an email with certain keywords. After further tinkering, the email also contained a list of news headlines, ascii art, a timelapse of all photos taken, and continuously changing messages.
I shared the email address and keywords with friends and my class; I was surprised to see several queries sent each day just to check up on my chilis. It was funny and heartwarming to see people use my program just out of curiosity towards some plants.

An photo showing the 3D-printed bridge I attended the III. National 3D printed Bridge Building Competition with. The bridge was 200g, and held 74.4 kg-s.
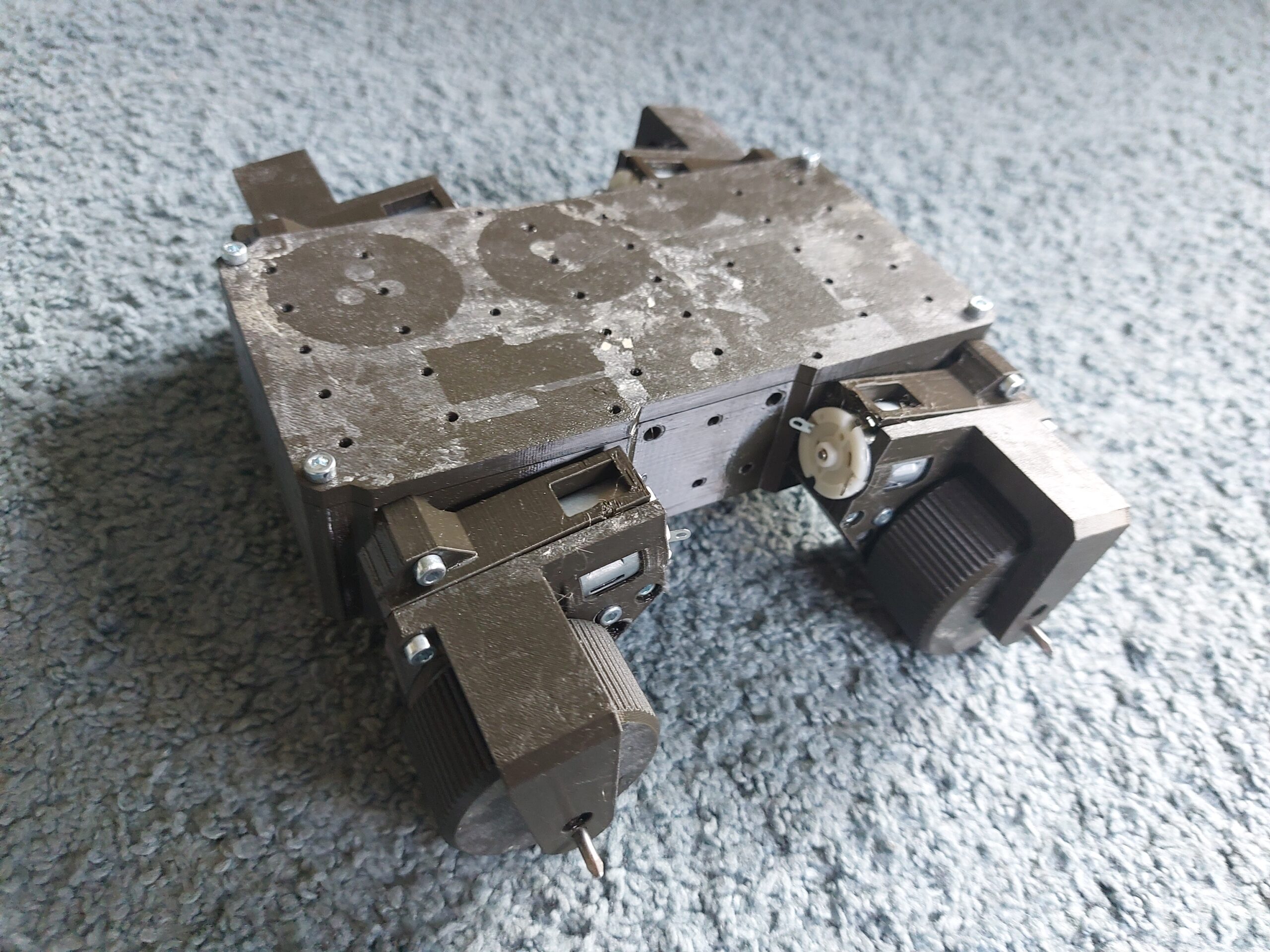
This is a 3D-printed robot base I designed for the Milestone Engineering Society’s first semester. The goal was to introduce members to 3D modeling and electronics, so I hosted an in-house BattleBot competition for which everyone 3D modeled and wired their own add-ons (flippers, spinners, etc.) on top of this base.
The robot used a worm drive made out of Igus J260 filament to gear down the low-cost DC motors we used. An Arduino with a DC motor shield and a Bluetooth module was used for controlling the robot.
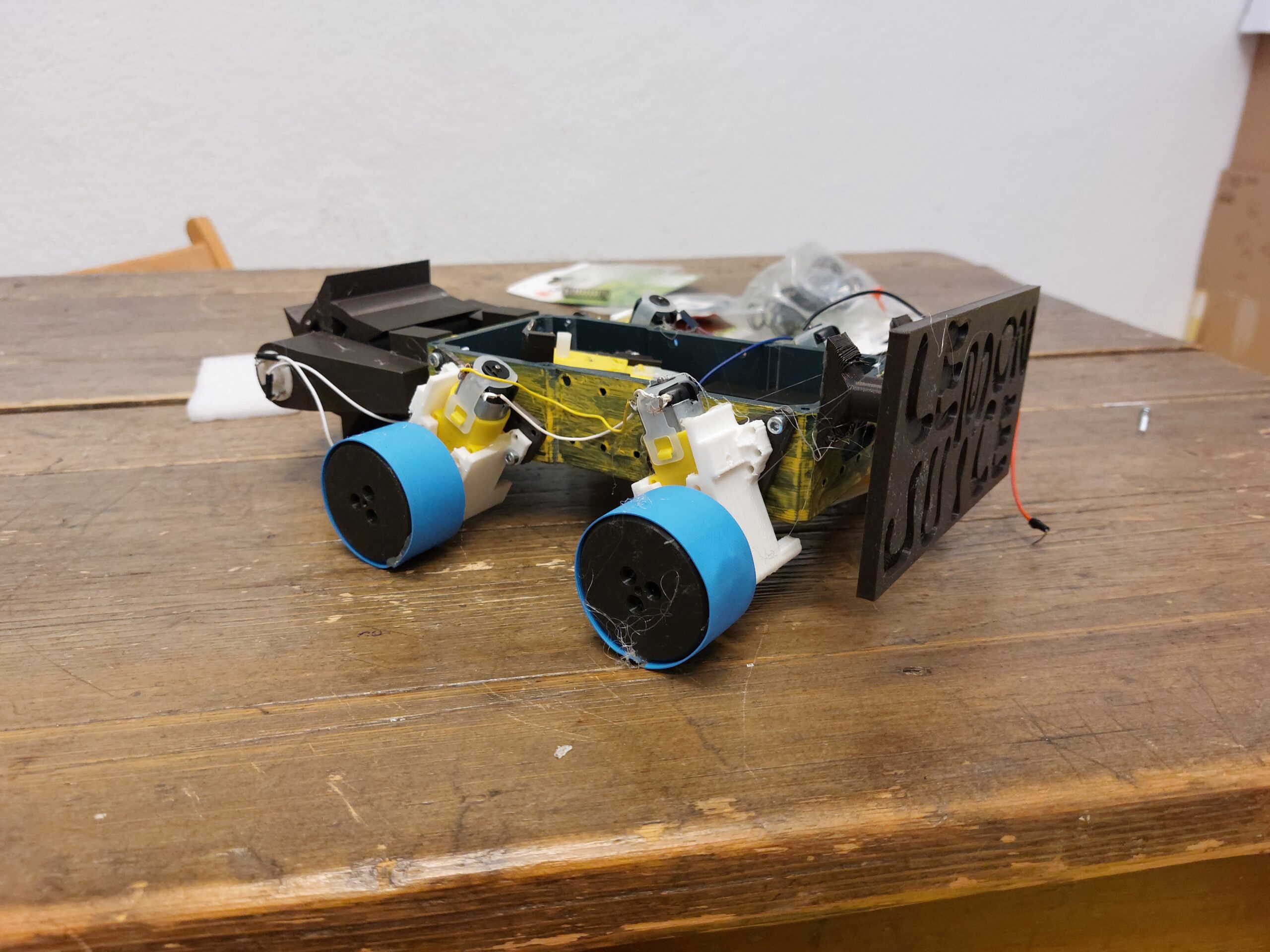
This is an example of a BattleBot that one team of students outfitted with a spinner at the front.

This photo shows members of the engineering society wiring up and assembling their robot bases.

A TinyWhoop drone that has a shell designed by me. The need for a low weight and high strength inspired me to take on my 3D-printed layer adhesion project.

I made various projects with PIC Microcontrollers and Arduinos. This video shows the setup sequence before the PIC18F4420-s are used as I2C slaves with a Raspberry Pi. I2C was needed to use the more robust PWM of the PIC-s to drive robotics.

This was made for last year’s school Santa event with one of the 9th graders. I used my RC airplane’s BLDC motor, ESC, and transmitter to launch candies as one of Santa’s helpers—it’s essentially a T-shirt cannon just sweeter.
This mini-gantry was the pilot project for high-speed gantry. It also used H-BOT belt routing.
